
How to Make a Good Sumo Robot
How to Design & Make a Good Sumo Robot
In this article, I will share my sumo robot design and build secrets. Firstly we are starting with sumo robot parts.
Please click the bottom image for bigger visual, in that article I will go deeply at each section for sumo robots.

We can divide sumo robot to 3 subdivision:
- Mechanic System – Structure
- Electronic System – Organs
- Software system – Robot’s spirit
Mechanics



DC Motors For Sumo Robots
Between 50-150 watt, 12-15-18-24 Volt motors are suitable. If you want to learn more about Maxon Motors just check out our information page Maxon motors for Sumo Robots. I suggest Maxon Model’s RE35 series, they are lightweight and have good torque and speed.





Smaller modules have high precision but also have less strength. Big moduled gears have less precision but have more strength.
Robot Gears
While designing drive train always think simple. Less gear is better if you can build (Less weight, less gear inertia, higher response). At Right, you can see one design for our gear bundle (6,42:1 – 0.8 Module).



Robot Wheels
35 to 55mm diameter wheels are used at our sumo robots. I prefer smaller wheels, because of having low inertia. You need to make custom made your wheels from hard rubber or polyurethane. And also wheel rims should be machined from aluminum.
If you can’t build the wheels by yourself. Look at our robot wheel selections. We have lots of different sized wheels for sumo robots.




Robot Body
Robot body can be made from Lexan PVC, aluminum, carbon fiber or steel. I prefer using aluminum. You can tap the aluminum quickly. 5-6 mm thickness aluminum is excellent material for chassis.
Aluminum’s one drawback is if you don’t choose true alloy it can be softer than expected. Always try to choose high strength aluminum alloys for body material. 60XX and 70XX series are JSumo’s choices.:)



Blades & Front Plates
Blades should be made from thin spring steel or HSS material. We are using both at our sumo robot projects. Spring steel gives little flexibility but not very durable. You need to change often. On the other hand, HSS gives us extreme rigidness. But also that is little fragile too due to very hard impacts in matchs.
For both options you can look to links below.
https://www.jsumo.com/japan-razor-blade-thin-0245-series This is spring steel Razor, thin & flexible.
https://www.jsumo.com/sumo-robot-blade-no1 This is thick HSS blade, very rigid and sharp.
While designing robot blade think it as changeable. If something happens or if your blade becomes obsolete you need to change quickly. For thin blades we attach with 3M brand or similar strong double sided tapes. And for other thick blades we are using M3 or M2.5 machine screws.
Here some sumo robot blade examples:







Now, we continue with electronics.
Robot Controllers (Pic, MBED, Arduino…)
These are brains of robots, like decision central. In practical usage, there is not a much big difference among any microcontroller brands like Microchip, Atmel or STM32… MBED & Renesas microcontrollers are very popular in Japan teams. You can use one of them, which you can use better.
My favorite is (If I don’t use Arduino things…) Pic16F877A microcontrollers. They are cheap and have enough input-output (33I/O) for interface connections. And for mini sumo robots, I use Arduino Nano models too. Their USB connectivity helps to make faster program and debug.





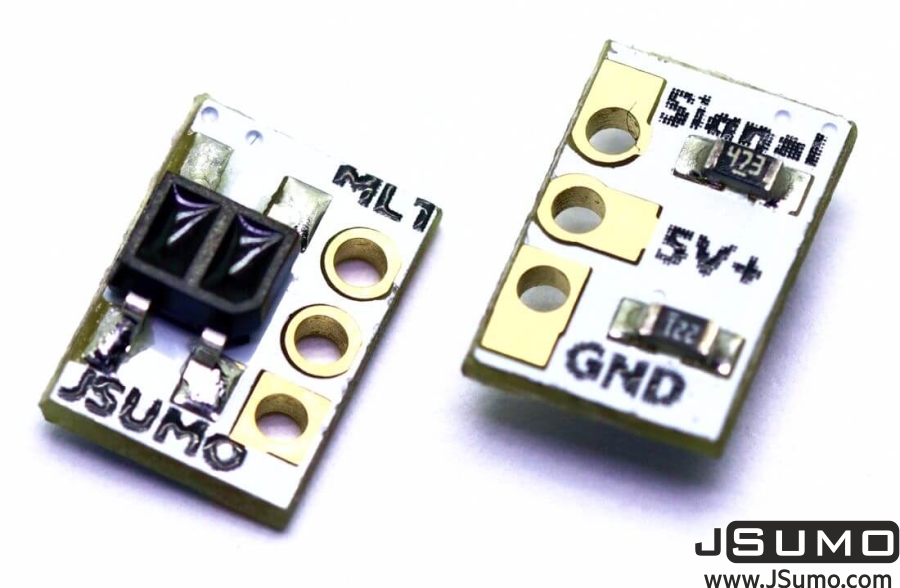
Edge Sensors
They are used to seeing dohyo’s edges. Sides painted white, and dohyo’s inner side painted black. So Edge sensor’s see the contrast. There are some popular models:
- QRD1114
- TCRT5000
- QTR1A
- ML1 (Smallest design that we made)
QRD1114 series optocouplers perform very well for edge detection. SMD models also work very well. My favorite is QTR1A based on QRE1113GR Optocoupler (right image). But when you are using SMD models. They may sense surface scratches easily. Be careful:) TCRT5000 line sensors can be used but be careful there are lots of fake TCRT5000 sensors are sold nowadays, and they don’t work well.
For sumo, place those sensors to 4 corners of the robot. For mini sumo, just front edges are enough.
{kind=link}




Opponent Sensors
They are eyes of the robot. You can use ultrasonic sensors, infrared sensors for opponent detection. I prefer using infrared sensors or visible modulated light sensors. They have faster response times than ultrasonic sensors. Use a lot of..:) I used 7 Pepperl+Fuchs red light sensors at my sumo robot Fusion. One Romanian project Flex was using 11! opponent sensors for making no blind point. When I talk with them at October 2015.
If I list the sensors based on sensing range:
- MZ80 – MR45 +
- Pepperl+Fuchs MLT1000 Series ++
- Omron E3Z D62 – D82 Series +++
- Keyence PZG41 Series ++++
Keyence models are made in Japan, and they have higher list prices, unfortunately. But they worth.







DC Motor Drivers
Motor drivers are essential for the engine choice. If you use big motors, also you have to use big, powerful motor controller. Roboclaw or Dimension Engineering motor controllers are right decisions. But how will you choose your motor driver? Here are some tips.
- It should deliver continuously 25A at least.
- It should work in high voltage for motors. (For instance, if you have 24V motor Maxon’s it needs to be driven in 30-36V)
- Easy to interface.
I want to add my last thought to that section. When I was first designing robots, I was using Sabertooth motor controllers. Nowadays also, I am seeing lots of teams using. But it has one significant drawback. Those motor controllers are MCU based, so they add tiny time delays to your robot’s response. It must be considered. I always use custom built MOSFET motor drivers at new designs.
L298 type drivers should be only used in non-magnetic sumo robot designs. (They are middle powered motor controllers)
Sumo Robot Programming
Robot software is the spirit of the robot. So It’s very crucial. Robot’s firmware changes all robot’s behavior. And for lots of makers, it is the most tricky part. I can suggest two languages:
- MikroC from Mikroelektronika (For Pic Controllers)
- Arduino Language (For Arduino based Boards)
- Picbasic for beginners (For Pic Controllers)
Nearly all C based languages are very similar and easy to understand. Also I suggest you to start from C based languages like Arduino language, MikroC or Cypress Psoc Programming Language. In our mini sumo building page you can find lots of information about programming and MikroC (Also we are giving sample program for mini sumo robot with easyboard controller)


Voltage Regulators
It’s most critical section of sumo electronics. When you make the system with High Voltage (24V or more), you must design voltage regulators with attention. We used to make linear, hot voltage regulators, previously. But now I design switching mode power supplies (Switching voltage regulators). They are more efficient than linear voltage regulators.
Simple designs include LM25xx series voltage regulator ICs. Like LM2596, LM2576.
Please be aware of that switching mode regulators also making more electrical noise and they can interfere more easily. Solution is design better. Use more & more capacitor.
RF or IR Remote Control
If you make fast sumo, you can not stop it by hand. Using remote control is a better option. For that purposes, we are using custom built IR transmitter and receiver circuits. A lot of competitions don’t allow using rf remote controls.


Cables, Wires & Connectors
We are using high-quality wires and connectors ar our robots. You may use soft thick wires for power conduction and thinner wires for data interfaces.
And as a connector types, I suggest using deans (T Plug) or XT60 connectors. Both perform very well. At jsumo robot shop also you can find lots of different type connectors for your robot project.
Hey RobotMaker! Do You Visited Our Online Shop?
Find Premium products for Sumo Robots and Mini Sumo Robots!
Maxon motors, sensors, good quailty robot chassis and more.. You can find all products at JSumo shop. We are shipping all over to the world.
Jesus
Hi where can I get the materials for a good sumobot??
Firat Dede
Hi Jesus, It is hard to find all materials from one supplier. Our shop can help you. http://jsumo.com/shop/ we sell some components for sumo robots (Motors, Control board, Gears, Sensors…) But some products should be made from custom designing So you have to produce it.
Pingback: how to make a robot | Berita Terbaru Terkini Hari Ini
Harshit Kasera
Hello sir,
How much torque and RPM will be good for a dc motor of 4-5kg sumobot
Harshit Kasera
Sir,how much torque and rpm will be good for a 4wheels,2wheel drive 4-5kg of sumo bot
TheVest
Has anyone used Brushless motors on one of these before? They tend to have a much higher power-to-weight ratio compared to brushed motors, but you also usually have to gear them down more.
Firat Dede
Hello friend, Yes you are right. But only sensored brushless motors can be used. At Vedder.se website there is lots of info about that. Check out 😉
German Altuve
Hola amigo quiero hacer un robot sumo para empezar algo sencillo quisiera saber o que me recomiendas para empezar sobre los motores sensores y la electrónica de control. lo otro es que vivo en Costa Rica y quiero comprar directamente en tu tienda ustedes envían acá yo tengo un casillero por Aeropost en Miami. Gracias.
Pingback: Construcción y Programación de Robot Minisumo | Aprendiendo Arduino
ethan
hey, i am participating in a sumo championship, should i use brushed or brushless motor? and where do i find them?
ethan
hey, i am participating in a sumo championship, should i use brushed or brushless motor? and where do i find them?
bishoy
is it good to make a 360 sloped robot so there is a slope on every side
Karel
You can try building a virtual sumo robot here: https://roboton.io/challenge/sumo
Firat Dede
Very ingenious 🙂 I tried with some basic sumo craft it works excellent. Maybe UI can be polished but it is minor update sure.
ERIC R
Hello, I don’t know if you can help me design a robot, I’m stuck in getting a gear module that is SGBUND in the store, but I don’t know if I can get the CAD, could you help me with that?