Here you can find sumo robots, mini – micro and BIG sumo robots.
Please wait little while fetching all projects!
Here you can find sumo robots, mini – micro and BIG sumo robots.
Please wait little while fetching all projects!
Robot and Team Name Robot: Federal M.T. Team Name: Team Uai!rrior When you build? And Duration of progress Federal M.T. was built in 2012 and it took around three months to set it. We put together the project from Autodesk Inventor, the electronic boards made on Altium Designer all together in our workshop, with the […]
Robot and Team Name Robot: Stonehenge – Team Name: ThundeRatz When you build? And Duration of progress The first project was made in 2012 and it took 1 year, but the newest version was made in 2016 and it took 1 year too. What was the hardest part you achieved? Reduction gears wore out quickly, […]
Robot and Team Name Line Follower, Quantum Bits When you build? And Duration of progress In this sumer, it takes 2 weeks. What was the hardest part you achieved? The programing. As it is my first robot.
Robot and Team Name The robot’s name is Maiara from WolfBotz which is part of the Student Branch IEEE CEFET/RJ When you build? And Duration of progress We started building in January 2019 and finished in May 2019, it took 4 months of work. However, it’s continuously upgraded and improved. What was the hardest part […]
When you build? And Duration of progress Probably, 3month What was the hardest part you achieved? Line following coding is one of the difficult part of to make line following robot, It consist from so many formulas, like a PID term. If you will ask you technical part? My first answer is always the motor. […]
When you build? And Duration of progress Well, this is a result of loong months of thinking, watching, considering, designing,redesigning, building,rebuilding. If I would sum up total real work time it would be like for a few days. This robot is made for 2020 competitions from Romania.
When you build? And Duration of progress I built it 2 years ago, it took me about a week to build it. It is designed in solidworks and sent to mechanize.
When you build? And Duration of progress I built my V1 about in 2 weeks, just before Robotex 2019. But I had been designing the 3d model for about one month on and off. If I would count how much time did it take, I would say that it would be about 20-25 hours in […]
When you build? And Duration of progress Since 2017 to 2019 What was the hardest part you achieved? The main program and mechanics of the robot in order to be as fast as possible
How many sensors robot uses? What is Edge sensor and Opponent Sensor Features? 4 Sensores Omron 2 Sensores de linea QT1A When you build? And Duration of progress in Days or Weeks… 2016 – 2 Meses
When you build? And Duration of progress. This year, and the build took around 5 months. Which difficulties you faced while building? The front of the robot was hard to make it as we hish.
I started to design with my team at the beginning of first months of 2015 at Istanbul, Turkey. I updated old design of Senju and it bringed me victory. We made very harsh matches with another Turkish teams and never lost.
I started to do it since July/2015 and this it 3rd evolution ever listening looking and learning how to be better The IMPALA “SS” born in December/2015 when I decided to do a better robot designing. And using better components first I need to buy some goods toys so I started to search where do […]
I have been inactive for about a year. We have been working on very special sumo robots. Unfortunately, I cannot disclose any details about the other robots. Kyuseishu Sumo Robot Specs: Max Speed: 7.2 m/s, limited to 6.1 m/s – 6.5 m/s Battery: 2x 3S Matched Impedance competition grade Li-Po batteries. I would recommend Gens Ace batteries if […]
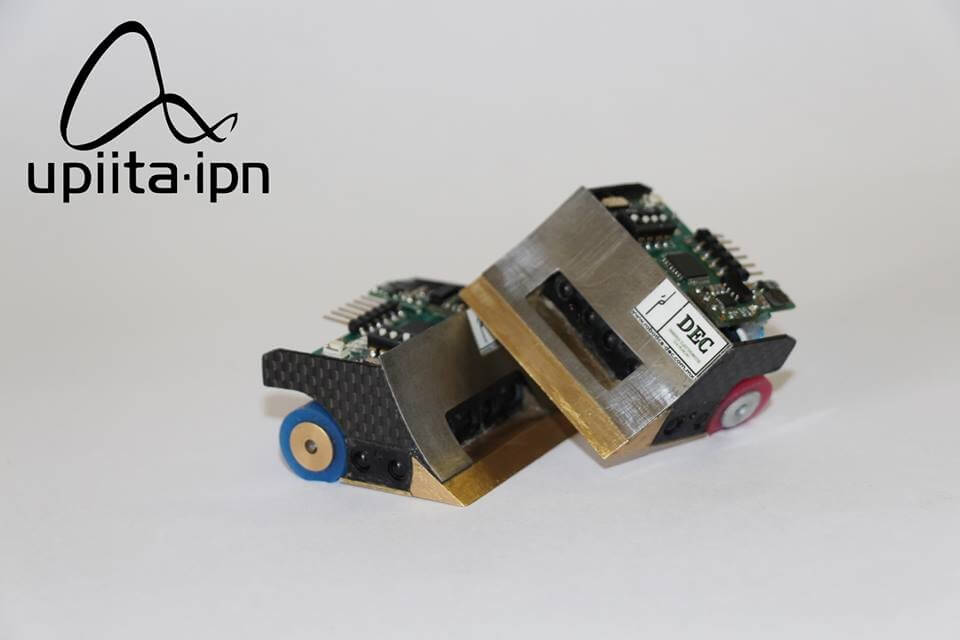
We are a Mexican team, and we were building this robot for a year, it’s principally made of brass. When we started,the principal problem was the space, we needed to put all the components in a very small area and like it was notenough we wanted that it looked great, for this reason, we started [...]
What is your Robot’s Name? Paladino (UFFight Robótica) (2015) Paladino is a 3Kg Radio controller sumo robot build by UFFight Robótica from Universidade Federal Fluminense. When you build? And Duration of progress. Paladino was design in the beginning of 2015, and has been improved since then. Which difficulties you faced while building? Due to the […]
Sakin is a Turkish word means “Calm”. The name comes up with the speed of the robot. Sakin sumo robot is not so fast nor so slow, middle speed can be called which makes it “Calm”.
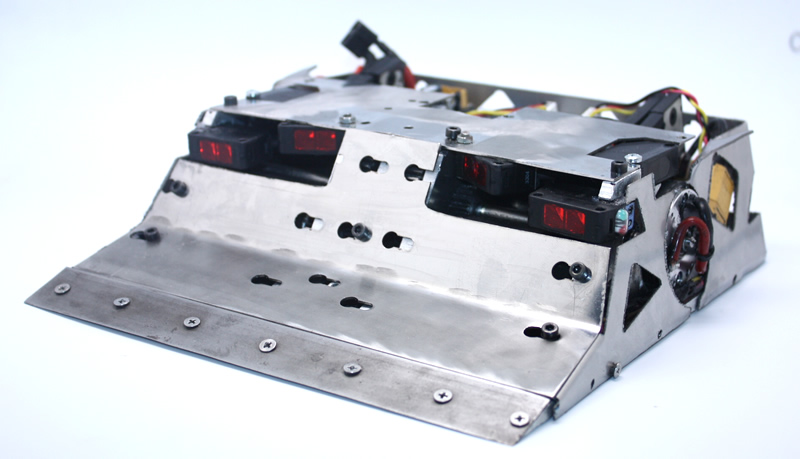
THE ROBOT What is made the Structure? Aluminum How many sensors we use? As you can see we use only 4 sensors Sharp 340KAs you can see we use only 4 sensors Sharp 340K Which Microcontroller? ATMEGA8 Motors: Fingertech 50:1 Battery: Lipo Turnigy 4s
When you build? And Duration of progress. Designed by EasyTeam in Tlaxcala, Mexico. In June 2015. It was hard & long progress but we managed. Still working and making better the design.
Hi, I will share informations about my mini-sumo robots which are called "Sinan Paşa". "Sinan Paşa V1" was so precious for me, because it was my first robot. Before I started to build my robot, I researched about robots, watched a few videos about mini-sumo robots, and read about them. Let's start with a video [...]
I started to design with my team (H-Tech Robot Team) at the beginning of first moths of 2014 at Istanbul, Turkey. Senju Robot won 4th degree at 26th (2014) All International Robot Sumo Tournament. The tournament which held at Tokyo, Japan. Features Maxon DCX35L 24V Motors – 2 Custom design gearbox 4.4:1 Custom design motor driver Keyence […]
Motors: Fırato 2: Maxon RE 40 Fırato Alpha : Maxon RE 35 Power Trains Max Speed Fırato San: 4.8 m/s Continuous 5 m/s peak Fırato-2 and Alpha: 4 m/s
Designed and built by TeamFlex in Romania, at the beginning of 2014. Features: Maxon RE40 148866 DC Motors – 2 2-stage gearbox with total ratio 5.7:1 Omron opponent sensors – 8 Banner opponent sensors – 3 Pepperl&Fuchs line detection sensors – 2 Calculated speed is somewhere around 5mps, but actual measured speed is between 3.5 […]
Design and manufacture: noclaf8810 Team: Team-Udon Robot name: Syuryo-kanna ※Japanese → しこ名:首領『神無』 This robot participated in the 2013 ALL JAPAN & INTERNATIONAL ROBOT SUMO TOURNAMENT (RC class). Ranking : Yokozuna (Champion)
Sumo Lancer. Benemérita Universidad Autónoma de Puebla, México. Facultad de Ciencias de la Electrónica. Lancer en la 1a Copa Internacional de Robótica ,Junio de 2013, México, Distrito Federal. Lancer en la 1a Copa Internacional de Robótica, Junio de 2013, México, Distrito Federal. Lancer en ROBOCORE Winter Challenge, Julio de 2013, São Caetano do Sul, São Paulo, Brasil.
Design: Mysterious Ryota (Ayashii Ryota) ※Japanese name: 怪しい涼汰 Manufacture: People of small factory in town (main Ota-ku), my friends and young engineers (Mitoyo technical high school students) Very very thank you for everybody’s cooperation!!
Design and manufacture: iwas6127 Team: reRo -KIS- This robot will be taken part in 2013 ALL JAPAN ROBOT-SUMO tournament (RC class).
Firstly, I design my minisumo on solidworks and I built it on a our 3 axis CNC machine. This robot participated in the RobotChallenge 2013 which is the most popular robotic organization in Europe. Features DC motor 650rpm 3.2kg/cm torque PRO4550-usb Controller Card 30 shore silicon wheels. (Radius is 32mm) 2 micro servo […]
Design and manufacture: noclaf8810 Team: Team-Udon This robot participated in the 2012 ALL JAPAN ROBOT-SUMO TOURNAMENT (RC class). Ranking : Best 12 Robot name: Syuryo-kanna ※Japanese → しこ名:首領『神無』 Features 2 Maxon RE40 DC Motors(24V) LiPo Battery 9 cell (max : 37.8V) Max Speed 4.5m/s Movable robot knife Gear and belt drive Motor Driver : 4 Pololu High-Power Motor Driver 36v20 […]
Features 12 Volt Maxon RE40 x 2 Keyence & Omron Sensors QTR1A Edge Sensors 6 Cell Li-Po (Total Voltage 25V Full Voltage) It has very small volume when compared with traditional japan robot sumos. You can add comment below 😉
At April 2013 I made new magnetic sumo robot. Features: 2 Maxon RE35 Dc Motors 2 Omron E3z-D62 Sensors 3 Keyence PZG-41 Sensors. 4 QRE1113GR Edge Sensors. Custom made motor controllers 2 Wheeled Design. A lot of neodmiyum magnets.
This year we built better sumo. It uses Keyence & Omron sensors.. Total six sensors robot use. It competed at: Uludag Robot Gunleri 2012 Meb Robotik Yarismasi 2012 Isparta SDU Robot Yarisması 2012 For now only one video and some photos..:) With new Arduino Sumo Robot Controller Card.
Sumo robot robot project from Gazi University, Turkey. Their site can be found here: http://www.robot.gazi.edu.tr/
Deep Impact Sumo Robot I watched videos of how to develop the project, Japanese sumo robots as fast as it can be extremely sharp turn in the thought of how make. And Deep Impact was born:) it has 2 edge contrast sensor, 2 ultrasonic sensor and 6 infrared sensors. It uses six Faulhaber dc gear […]






























Maamoun Juma
Hi there,
I have ordered symtec gear motors, and I want to short the shaft to make motors suitable for 20×20 cm robot sumo.
I contant you in Instagram and they say the motors in production so I want to short the shaft from 32.4 to 24.4.
Please reply me as soon as you can.
Thank you,
Maamoun